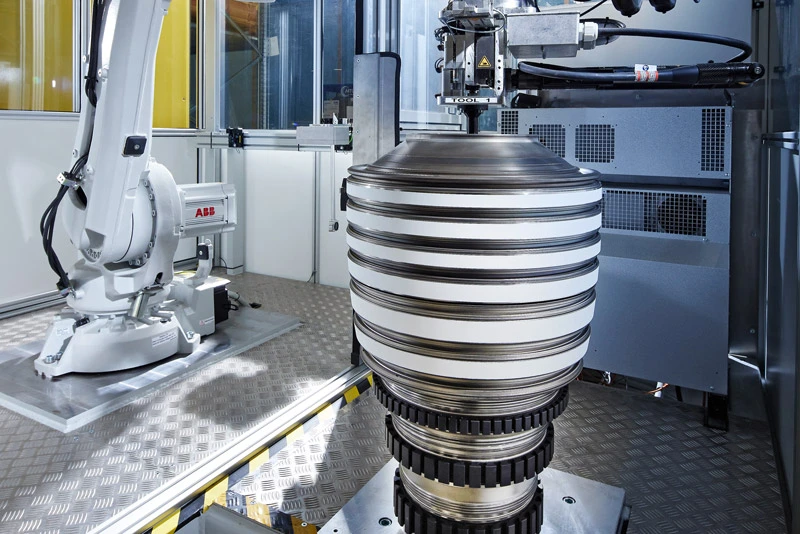
Einrüsten –Teil 1:
Zunächst wird die vordere Verdichtertrommel eingerüstet.
Einrüsten – Teil 2:
Im zweiten Schritt wird die hintere Verdichtertrommel für den Verschraubungsprozess vorbereitet.
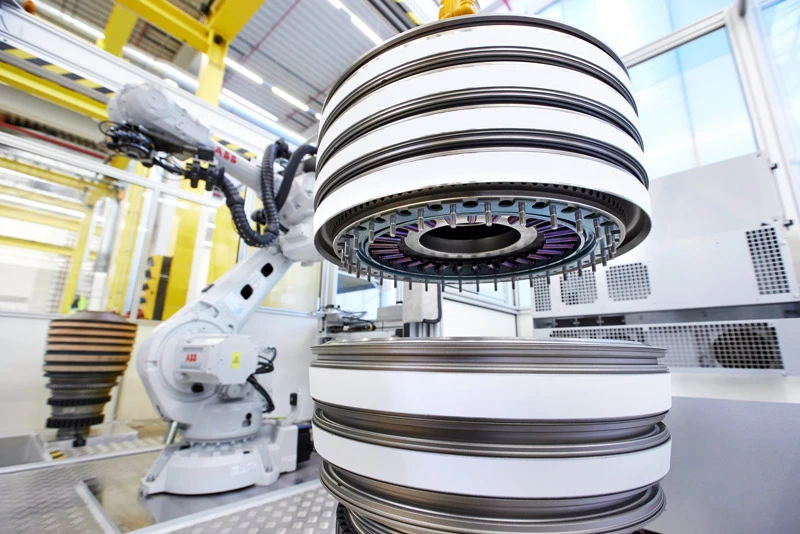
Vorrichtung auf Spannstation:
Die vorderen und hinteren Verdichtertrommeln werden nun auf der Spannvorrichtung zusammengefügt. Während der Rotor auf der Spannvorrichtung mit den vorbereiteten Kleinteilen aus der einen Kammer verschraubt wird, kann die nächste Kammer bereits gerüstet werden.
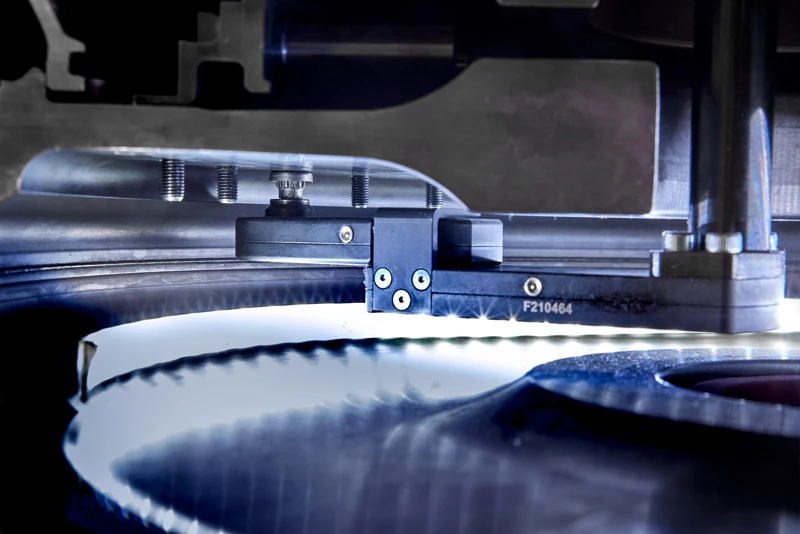
Vollautomatisches Greifen:
Der Roboter nimmt sich mit einem pneumatischen Greifer Mutter und Unterlegscheibe und positioniert diese im ausklappbaren Flachabtrieb.
Präzise Verschraubung:
Hier verschraubt der Industrieroboter die beiden Trommeln des Rotors – vollautomatisch und präziser als von Menschenhand möglich.
3 Schritte:
Die Verschraubung von 34 Muttern erfolgt wie in der Vergangenheit sukzessive in jeweils drei Schritten – first seeting, second seating, final torque. Durch den Klappabtrieb kann selbst im engsten Bauraum der Trommeln automatisch verschraubt werden.
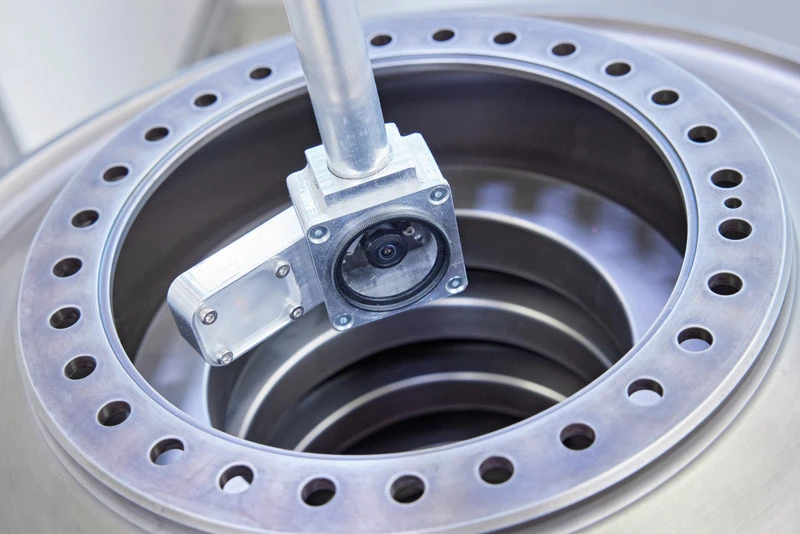
Kamerafahrt:
Die Anlage fährt jetzt mit einer Kamera in den Rotor und dokumentiert, ob in der Innensicht des Rotors alles in Ordnung ist und alles korrekt verschraubt wurde.
Kameradokumentation:
Die entsprechenden Bilddaten werden zudem zur Dokumentation archiviert. So kann der Prozess auch “Remote” überwacht werden.